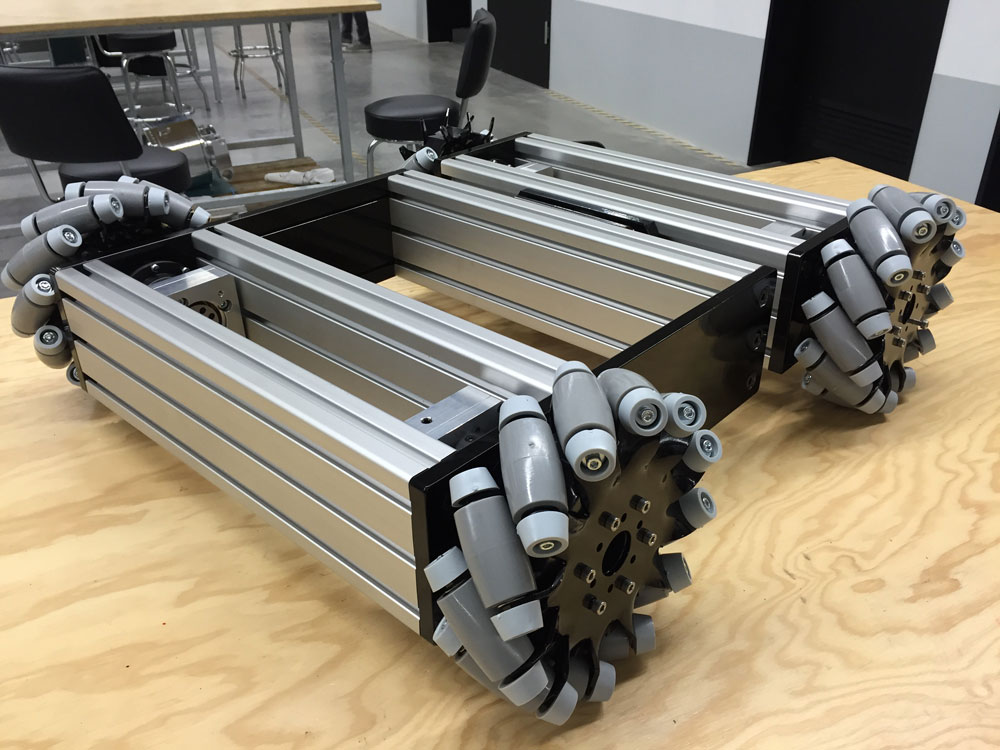
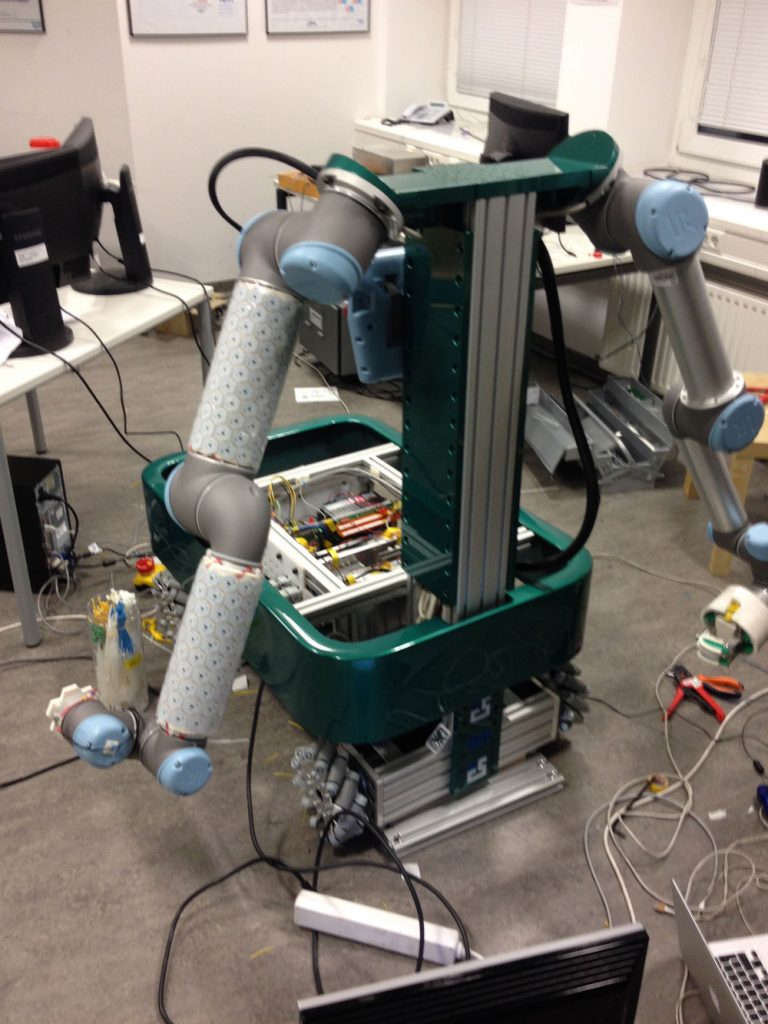
TOMM (Tactile Omnidirectional Mobile Manipulator) is a dual arm wheeled humanoid robot with 6 DoF on each arm, 4 omnidirectional wheels and 2 interchangeable end-effectors.
The main feature of TOMM is its arms and hands which are covered with artificial skin developed in TUM’s research lab. We built this robot to be a cost-efficient research platform with two standard UR5 manipulators.
skills
What Bren did
HARDWARE
SOFTWARE
ELECTRONICS
View in action
Project Gallery
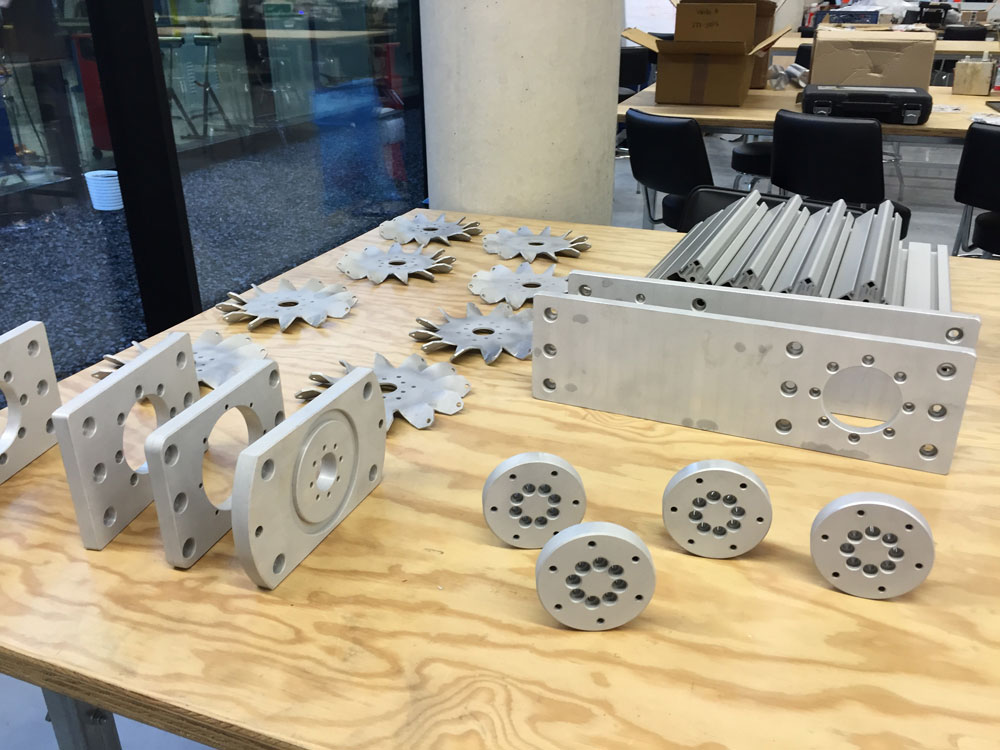
Some pictures of TOMM being made. We produced 5 bases in total that were also used in the University of Bremen, Germany.
Looking for an awesome robotic design for your next project? Or for Bren to talk at your next event?