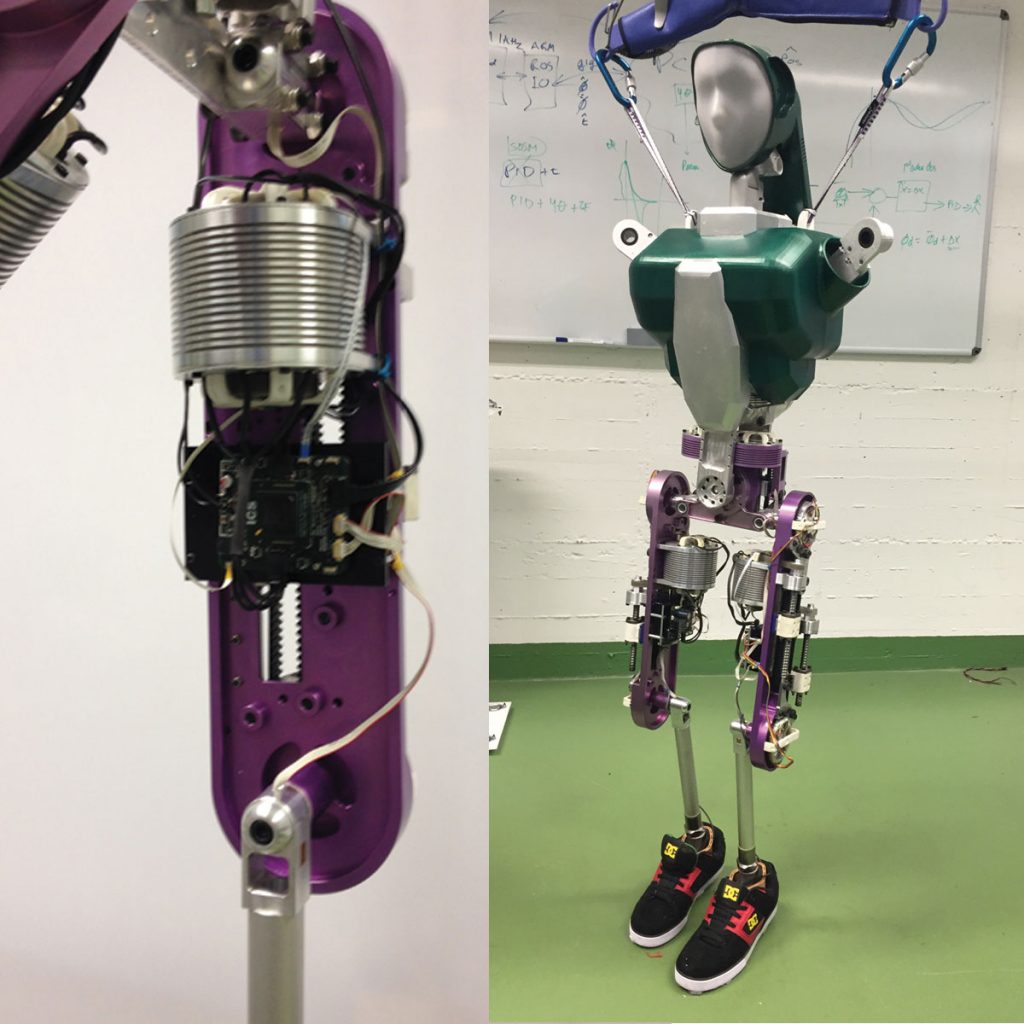
Herbert is a full-sized anthropometrically correct humanoid robot.
With the creation of Herbert I aimed to achieve a simple design approach combined with keeping the costs low while ensuring a consistent high performance.
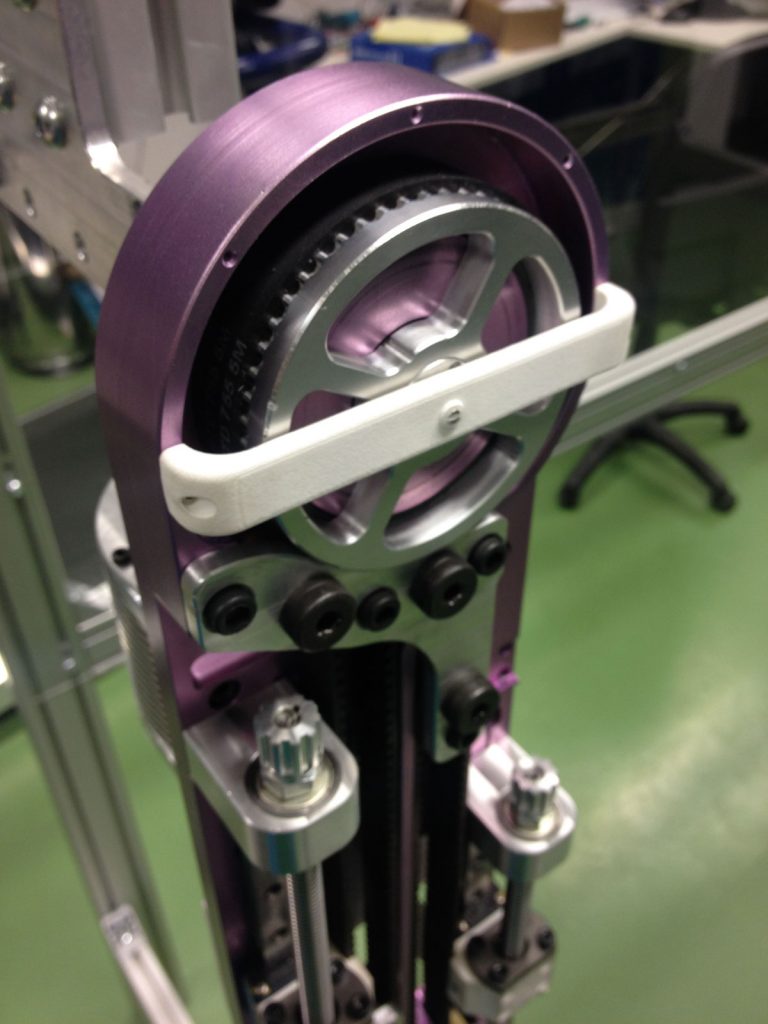
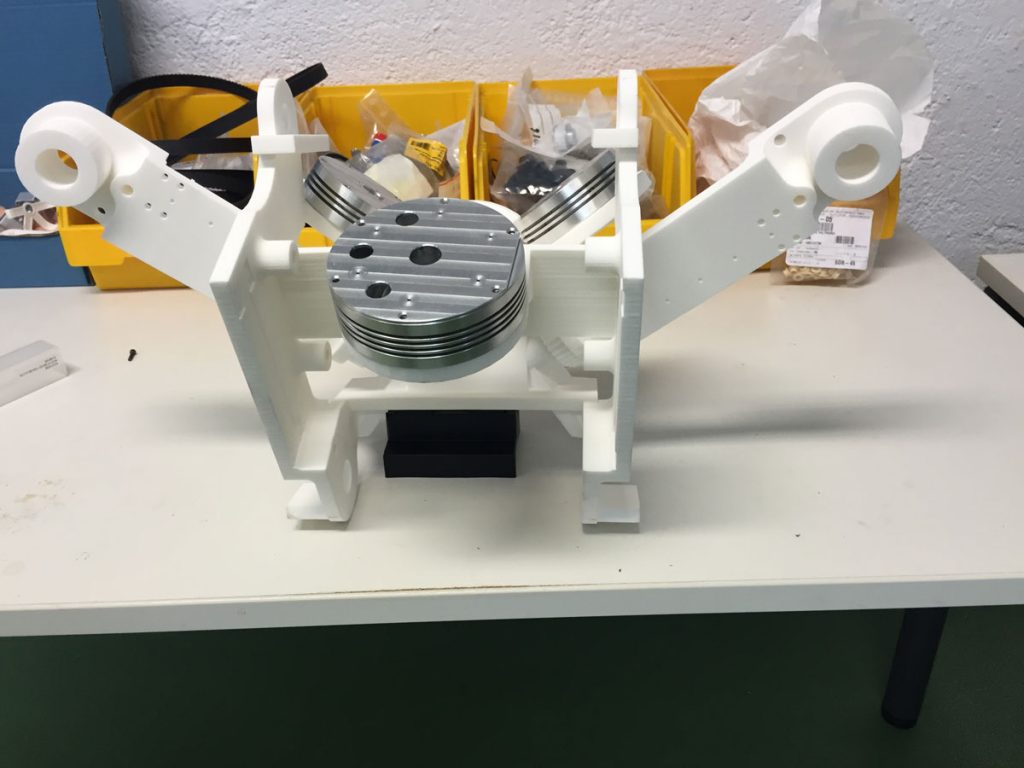
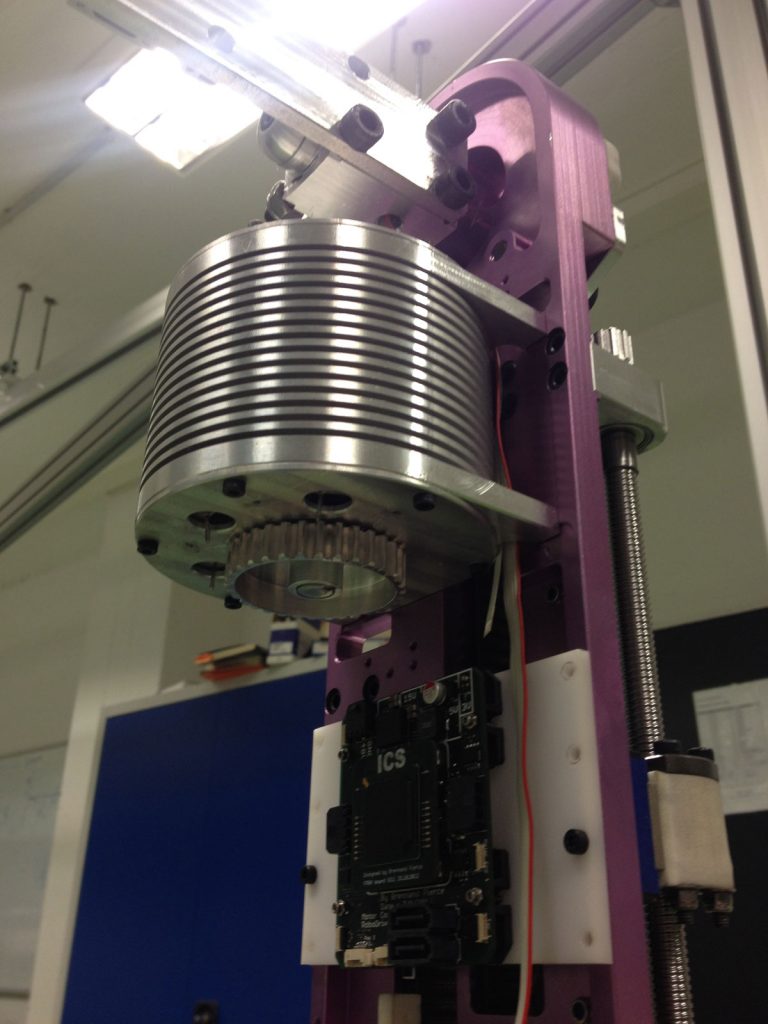
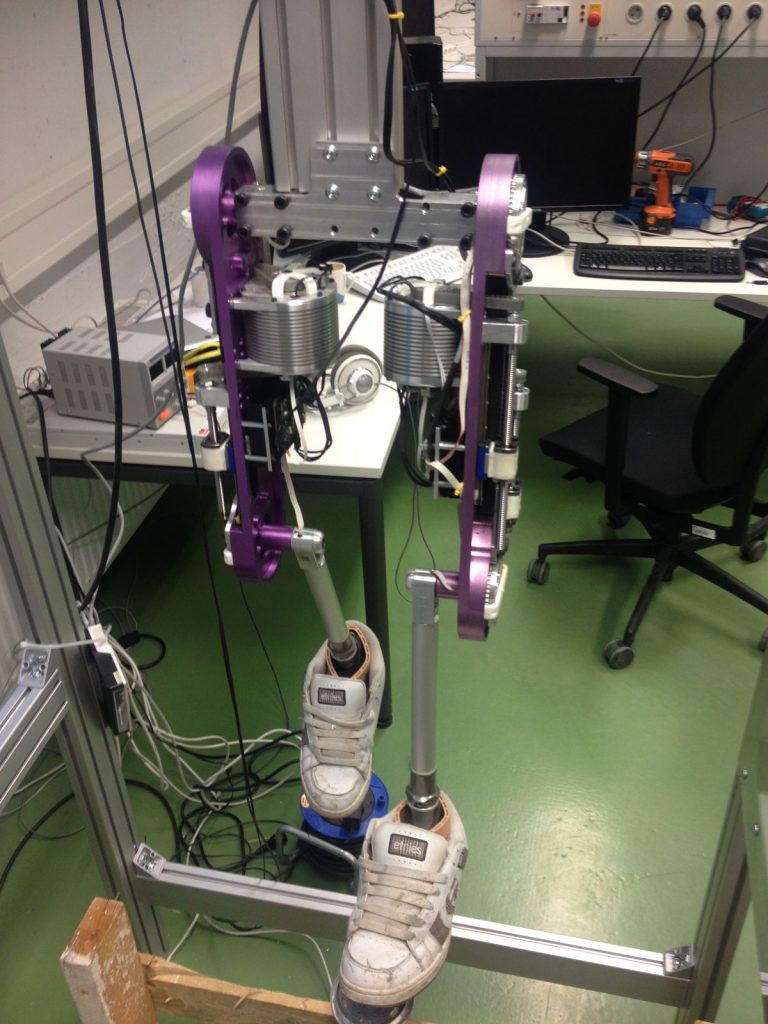
Herbert has 18 DOF in total, while 14 are active and 4 are passive. This humanoid robot exists of two core mechanical modules; a small compact drive module and a compliant drive module.
I also designed and built a module electronics system based on FPGA to control all the joints and sensors. To make Herbert walk, I also wrote the low-level FPGA code as well as the high-level ROS codebase.